“One option could be to have astronauts use this simulation to prepare for upcoming lunar exploration missions,” said Joe Louca.
How will future missions to the Moon help extract valuable resources that can be used for scientific research or lunar settlement infrastructure? This is what a recent study being presented this week at the IROS 2024 (IEEE/RSJ International Conference on Intelligent Robots and Systems) hopes to address as a team of researchers from the University of Bristol investigated how a combination of virtual simulations and robotic commands could help enhance teleoperated robotic exploration on the lunar surface on future missions.
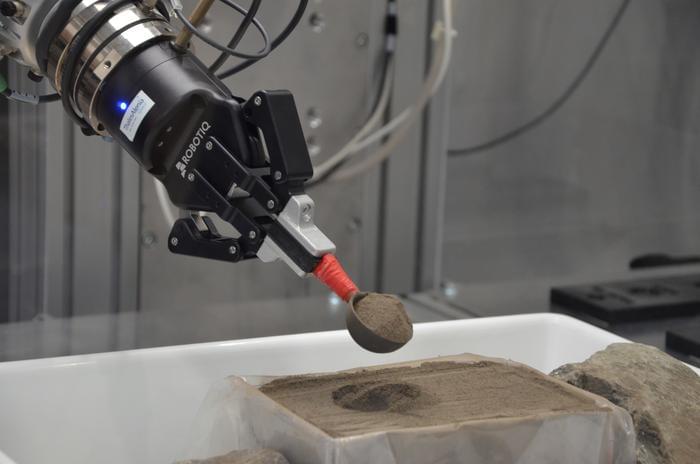
For the study, the researchers used a method called model-mediated teleoperation (MMT) to create simulated regolith and send commands to a robot that carried out the task. In the end, the researchers found effectiveness and trustworthiness of the simulated regolith to the robot conducting the tasks was 100 percent and 92.5 percent, respectively. The reason teleoperated robots are essential is due to the time lag between the Earth and the Moon and extracting resources from the lunar surface, known as in-situ resource utilization (ISRU), is also being deemed an essential task at developing lunar infrastructure for future astronauts.