{kind=link}
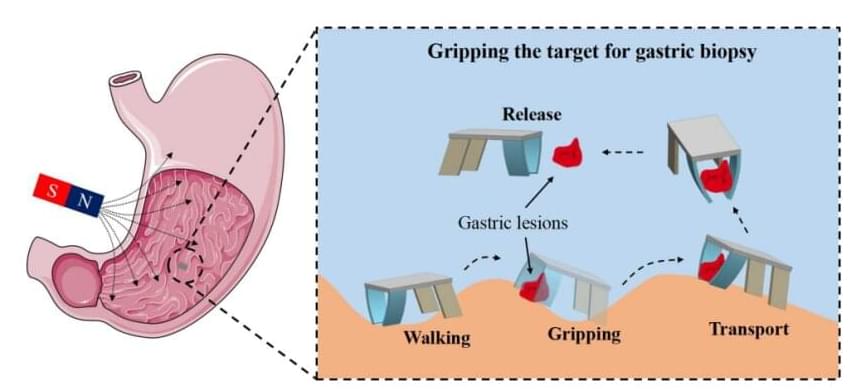
Recently, a research team from Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, proposed a bionic quadruped soft thin-film microrobot actuated by magnetic fields with a mass of only 41 mg, which promises to be applied to stomach examination and treatment. Researchers realized the multimodal locomotion control of the soft microrobot in magnetic fields and the grasping and transportation of micro-objects by the soft microrobot.
The new paper, published in Cyborg and Bionic Systems, details the process of making the microrobot and the magnetization process, presents the mechanism of microrobot’s locomotion and cargo transportation, and demonstrates the microrobot transporting multiple microbeads from different locations to the target position.
Untethered microrobots have received much attention for their potential in biomedical applications and small-scale micromanipulation. “Due to the fact that magnetic fields are harmless to biological cells and tissues, magnetic fields are widely used to actuate microrobots for biomedical applications,” explained study author Tiantian Xu, a professor at the Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences.