Roboticists are envisioning a future in which soft, animal-inspired robots can be safely deployed in difficult-to-access environments, such as inside the human body or in spaces that are too dangerous for humans to work, in which rigid robots cannot currently be used. Centimeter-sized soft robots have been created, but thus far it has not been possible to fabricate multifunctional flexible robots that can move and operate at smaller size scales.
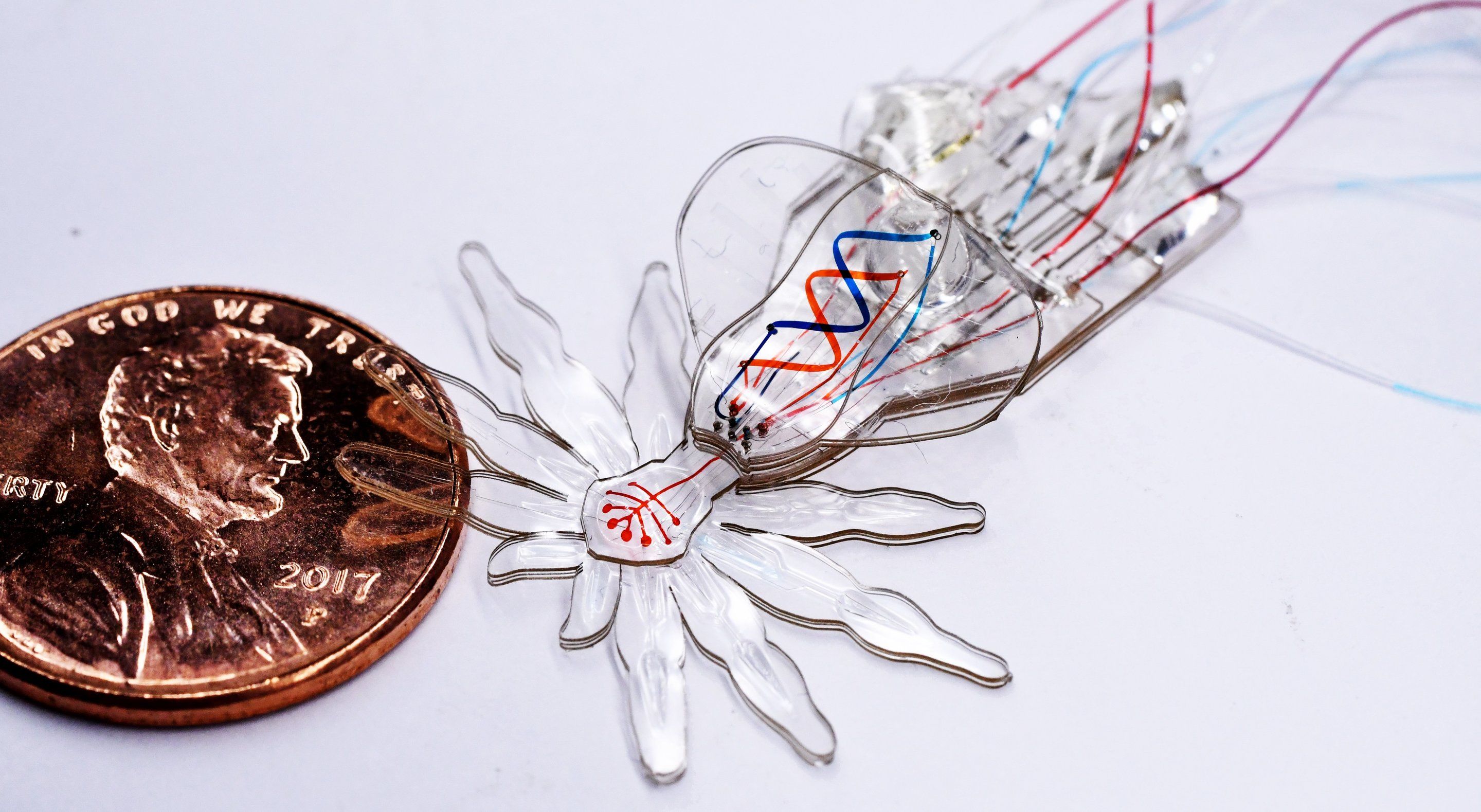
A team of researchers at Harvard’s Wyss Institute for Biologically Inspired Engineering, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), and Boston University now has overcome this challenge by developing an integrated fabrication process that enables the design of soft robots on the millimeter scale with micrometer-scale features. To demonstrate the capabilities of their new technology, they created a robotic soft spider – inspired by the millimeter-sized colorful Australian peacock spider – from a single elastic material with body-shaping, motion, and color features. The study is published in Advanced Materials.
“The smallest soft robotic systems still tend to be very simple, with usually only one degree of freedom, which means that they can only actuate one particular change in shape or type of movement,” said Sheila Russo, Ph.D., co-author of the study. Russo helped initiate the project as a Postdoctoral Fellow in Robert Wood’s group at the Wyss Institute and SEAS and now is Assistant Professor at Boston University. “By developing a new hybrid technology that merges three different fabrication techniques, we created a soft robotic spider made only of silicone rubber with 18 degrees of freedom, encompassing changes in structure, motion, and color, and with tiny features in the micrometer range.”